WIP / Rigging Projects:
As of March 20th I have been staying in shape and building my portfolio with two seperate Rigging projects.
A soft-body-deformation Project that is using a female character from Malachi Bazan's portfolio. His work can be viewed at http://www.lostliquid.com/.
For the soft-Body Project I am using Angel from Malachi Bazan's entry in XSI 5 The Official Guide by Anthony Rossano. I too was forunate enough to have contributed to the final tutorial for Rigid Body Dynamics in this same book. More on that in another post.
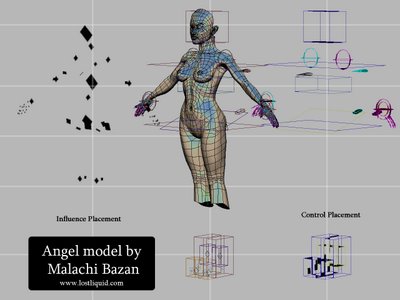
Angel's Geometry
A soft-body-deformation Project that is using a female character from Malachi Bazan's portfolio. His work can be viewed at http://www.lostliquid.com/.
For the soft-Body Project I am using Angel from Malachi Bazan's entry in XSI 5 The Official Guide by Anthony Rossano. I too was forunate enough to have contributed to the final tutorial for Rigid Body Dynamics in this same book. More on that in another post.
Angel's Geometry
Angels Controls (CON) and Influences (INFL)
and a Rigid-Body-Deformation Project using the robot character below which I designed for an Imaginary Autonomous UN Force of the future.
This is an SBAM Robot. (Squad Based Autonomous Mortar - Delivery System)
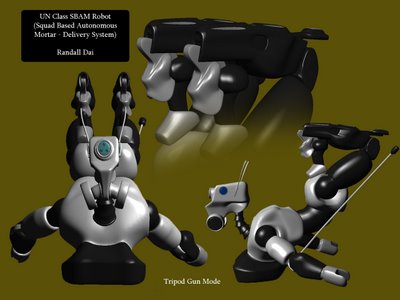
They are capable of delivering 12 Mortar rounds with a Maximum Effective Range of 1000
meters. 4 of them can cover an entire city building and are capable of ground to air anti-aircraft missiles.
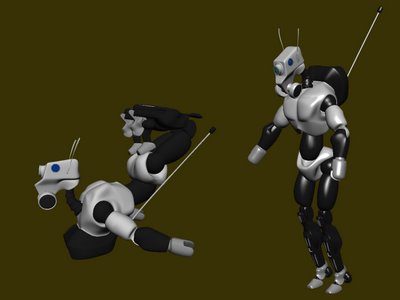
I have placed pivot points and rotation controls in odd places to investigate new solutions for rigging. At least two different Rigs are required for this character to enhance an animator's control in the bipedal and gun modes.
posted by Mr. Gone at 3:19 PM
![]()
![]()

0 Comments:
Post a Comment
<< Home